微博限流怎么解决(微博限流如何解决)
(关注ID:chinak958888)
(中国制造2025自媒体领导者)
关注我们,结交自动化技术人
电机启动常见方法
1、定时自动循环控制电路
说明:(技师一)
1、题图中的三相异步电动机容量为1.5KW,要求电路能定时自动循环正反转控制;正转维持时间为20秒钟,反转维持时间为40秒钟。
2、按原理图在配电板上配线,要求线路明快、工艺合理、接点牢靠。
3、简述电路工作原理。
注:时间继电器的延时时间不得小于15秒,时间调整应从长向短调。
定时自动循环控制电路电路工作原理:合上电源开关QF,按保持按钮SB2,中间继电器KA吸合,KA的自保触点与按钮SB2、KT1、KT2断电延时闭合的动断触点组成的串联电路并联,接通了起动控制电路。按起动按钮SB3,时间继电器KT1得电,其断电延时断开的动合触点KT1闭合,接触器KM1线圈得电,主触点闭合,电动机正转(正转维持时间为20秒计时开始)。同时KM1动合触点接通了时间继电器KT2,其串联在接触器KM2线圈回路中的断电延时断开的动合触点KT2闭合,由于KM1的互锁触点此时已断开,接触器KM2线圈不能通电。当正转维持时间结束后,断电延时断开的动合触点KT1断开,KM1释放,电动机正转停止。KM1的动断触点闭合,接触器KM2线圈得电,主触点闭合,电动机开始反转.同时KM1动合触点断开了时间继电器KT2线圈回路(反转维持时间为40秒计时开始)。这时KM2动合触点又接通了KT1线圈,断电延时断开的动合触点KT1闭合,为下次电动机正转作准备。因此时串联在接触器KM1线圈回路中的KM2互锁触点断开,接触器KM1线圈暂时不得电。与按钮SB2串联的KT1、KT2断电延时闭合的动断触点是保证在电动机自动循环结束后,才能再次起动控制电路。 热继电器FR常闭触点,是在电动机过负载或缺相过热时将控制电路自动断开,保护了电动机。
2、顺序控制电路(范例)
顺序控制电路(范例)工作原理:图A:KM2线圈电路由KM1线圈电路起动、停止控制环节之后接出。按下起动按钮SB2,KM1线圈得电吸合并自锁,此时才能控制KM2线圈电路。停止按钮SB3只能控制M2电动机的停转,停止按钮SB1为全停按钮。本电路只有满足M1电动机先起动的条件,才能起动M2电动机。
图B:控制电路由KM1线圈电路和KM2线圈电路单独构成。KM1的动合触点作为一控制条件,串接在KM2线圈电路中,只有KM1线圈得电吸合,其辅组助动合触点闭合,此时才能控制KM2线圈电路。停止按钮SB3只能控制M2电动机的停转,停止按钮SB1为全停按钮。本电路只有满足M1电动机先起动的条件,才能起动M2电动机。
3、电动机顺序控制电路
说明:(技师二)
1、本电路起动顺序是先M1电动机,后M2电动机;停止顺序则相反。
2、PLC(三菱FX0N、FX1N),编程器连接及通电操作。
3、清零操作;程序写入操作;根据梯形图写出指令表。
4、主机上用导线连接电动机顺序控制。
电动机顺序控制电路工作原理:合上电源开关QS,按下起动按钮SB1,接触器KM1得电吸合并自保,M1电动机起动运转。KM1的另一动合触点闭合,为接触器KM2得电作准备。按下起动按钮SB2,接触器KM2得电吸合并自保,M2电动机起动运转。起动顺序是先KM1吸合,M1电动机起动运转;后KM2吸合,M2电动机起动运转。停车顺序是:只有先按下按钮SB4,使接触器KM2断电释放,KM2的动合触点断开,M2电动机停转后再按SB3,M1电动机才能停止运转。热继电器FR1、FR2常闭触点,是在电动机过负载或缺相过热时将控制电路自动断开,保护了电动机。
4、异步电动机可逆控制电路(范例)
可逆控制电路(范例)电路工作原理:
(图A)按下SB2,KM1得电吸合,电动机起动正转。按下SB1,KM1断电释放,电动机停转。按下SB3,KM2得电吸合,电动机起动反转。按下SB1,KM2断电释放,电动机停转。缺点:不能同时按下SB2 、SB3按钮,否则电源将短路,电动机无法工作。原因:主电路接触器KM1、KM2连接到电动机M的是两种相序的电源,若同时吸合,在接触器连接点上电源被短路。
(图B)原理同图A。在KM1线圈电路中串接了KM2的一个动断触点:同样,在KM2线圈电路中串接了KM1的一个动断触点。这两个动断触点称互锁触点,这种互锁称电气互锁。保证了任何时候只有一只接触器吸合,避免了电源短路。缺点:必须先按停止按钮SB1,电动机停转后,才能起动电动机的另一旋转方向。
(图C)在上图基础上增加了由起动按钮的动断触点构成的机械互锁。如:按下SB2,串接在KM2线圈电路中SB2动断触点断开了KM2线路。保证了两个接触器不能同时吸合,又能不按停止按钮直接起动电动机另一旋转方向。
5、双重连锁可逆控制电路
说明:(高级)
1、按原理图在配电板上配线,要求线路明快、工艺合理、接点牢靠。
2、简述电路工作原理
双重连锁可逆控制电路工作原理:按起动按钮SB2,KM1吸合并自保,电动机正转。与按钮SB2常触开点并联的KM1触点为自保触点。按起动按钮SB3,KM1断电释放,KM2吸合并自保,电动机反转。SB1为停止按钮。电路由按钮SB2、SB3的动断触点实现了机械联锁,串联在交流接触器线圈KM1、KM2中的KM2、KM1辅助动断触点实现了电气联锁。串联在控制电路中的FR动断触点,是在电动机过负载或缺相过热时热继电器将控制电路自动断开,保护了电动机。
6、限位开关控制自动往复电路(1)
限位开关控制自动往复电路
(1)工作原理:按起动按钮SB2,KM1吸合并自保,电动机正转,带动机械设备左移。当撞块碰压行程开关SQ2时,KM1断电,KM2得电吸合并自保,电动机反转,机械设备右移。当撞块碰压行程开关SQ1时,KM2断电,KM1得电,电动机又正转左移。SB1为停止按钮。电路由按钮SB2、SB3及行程开关SQ1、 SQ2的动断触点实现了机械联锁,串联在交流接触器线圈KM1、KM2中的KM2、KM1辅助触点实现了电气联锁。串联在控制电路中的FR常闭触点,是在电动机过负载或缺相过热时热继电器将控制电路自动断开,保护了电动机。
7、限位开关控制自动往复电路(2)
限位开关控制自动往复电路(2)电路工作原理:
按起动按钮SB2,KM1吸合并自保,电动机正转,带动机械设备左移。当撞块碰压行程开关SQ2时,KM1断电,KM2得电吸合并自保,电动机反转,机械设备右移。当撞块碰压行程开关SQ1时,KM2断电,KM1得电,电动机又正转左移。SB1为停止按钮。电路由按钮SB2、SB3及行程开关SQ1、 SQ2的动断触点实现了机械联锁,串联在交流接触器线圈KM1、KM2中的KM2、KM1辅助触点实现了电气联锁。串联在控制电路中的FR常闭触点,是在电动机过负载或缺相过热时热继电器将控制电路自动断开,保护了电动机。
SQ3、SQ4S是左移和右移的终端位置行程开关。
8、星形—三角形起动控制电路
星形—三角形起动控制电路工作原理:
按起动按钮SB2,接触器KM1、KM3和时间继电器KT线圈得电吸合并自保,电动机星形(Y)接法起动。当KT预定延时时间结束时,KM3线圈电路中的通电延时断开的动断触点断开,KM3断电释放,电动机星接(Y)起动结束。此时,KM2线圈电路中的通电延时闭合的动合触点闭合。KM2线圈得电吸合,电动机改为三角形(△)接法运转。串联在接触器线圈KM3、KM2电路中的KM2、KM3辅助动合触点实现了电气联锁。串联在控制电路中的FR动断触点,是在电动机过负载或缺相过热时热继电器将控制电路自动断开,保护了电动机。
星形—三角形起动控制电路(2)
星形—三角形起动控制电路(3)
星形—三角形起动控制电路(3)工作原理:
按起动按钮SB2,接触器KM3、KM1和时间继电器KT线圈得电吸合并自保,电动机星形(Y)接法起动。当KT预定延时时间结束时,KM3线圈电路中的通电延时断开的动断触点断开,KM3断电释放,电动机星接(Y)起动结束,KM2线圈得电吸合,电动机改为三角形(△)接法运转。串联在控制电路中的FR动断触点,是在电动机过负载或缺相过热时热继电器将控制电路自动断开,保护了电动机。
9、自耦变压器减压起动起动控制电路
自耦变压器减压起动控制电路工作原理:
合上电源开关,按起动按钮SB2,接触器KM1线圈得电吸合并自保,将自耦变压器T接入,电动机定子绕组经自耦变压器供电减压起动;同时,KT线圈得电吸合,计时开始。当KT整定延时时间结束时,其通电延时闭合的动合触点闭合,使中间继电器KA的线圈得电吸合并自保,KM1断电释放,其主触点断开; KM2线圈得电吸合,其主触点闭合,自耦变压器被切除,电动机全压运行。
自耦变压器减压起动起动控制电路(2)
10、时间原则能耗制动控制电路
时间原则能耗制动控制电路工作原理:
合上电源开关,按起动按钮SB2,接触器KM1线圈得电吸合并自保,电动机起动运转。当按停止按钮SB1时,KM1线圈断电释放,其主触点断开,定子绕组断电;同时,KM2、KT线圈得电吸合并,KM2主触点闭合,电动机二相定子绕组接入直流电源进行能耗制动。使电动机转速迅速下降,当机转接近零时,时间继电器KT延时时间到。其通电延时断开的动断触点断开,使KM2、KT线圈相继断电释放,制动过程结束。
RP为调节制动力大小的限流电阻。
时间原则能耗制动控制电路(2)
11、电动机电容制动制动控制电路
12、4/2极双速电动机起动电路
4/2极双速电动机起动控制电路工作原理:
图中KM1为三角形接法(△)接触器,KM2、 KM3为双星形接法(YY)接触器。
合上电源开关,按起动按钮SB2,接触器KM1、KT线圈相继得电吸合并自保,电动机定子绕组接成三角形接法(△)4极起动;经一定时间延时后,KT的通电延时断开的动断触点断开,KM1断电释放,KT的通电延时闭合的动合触点闭合,KM2、 KM3线圈得电吸合并自保,电动机定子绕组接成双星形接法(YY)2极运转。
由于双速电动机定子绕组的接线原因,换极的同时应改变电源的相序。
13、4/2极双速电动机起动电路(2)
4/2极双速电动机起动控制电路工作原理:
图中KM1为三角形接法(△)接触器,KM2、 KM3为双星形接法(YY)接触器。
合上电源开关,按起动按钮SB2,接触器KM1、KT线圈相继得电吸合并自保,电动机定子绕组接成三角形接法(△)4极起动;经一定时间延时后,KT的通电延时断开的动断触点断开,KM1断电释放,KT的通电延时闭合的动合触点闭合,KM2、 KM3线圈得电吸合并自保,电动机定子绕组接成双星形接法(YY)2极运转。
由于双速电动机定子绕组的接线原因,换极的同时应改变电源的相序。
串联在控制电路中的FR动断触点,是在电动机过负载或缺相过热时热继电器将控制电路自动断开,保护了电动机。
14、CW6140普通车床控制电路
CW6140普通车床控制线路分析与故障处理:
")
一、线路分析
1、主电路分析
主电路有两台电动机,M1为主电动机,M2为 冷却泵电动机,QS为电源开关。
接触器KM控制M1的启动和停止。转换开关Q1控制M2的工作状态。M2由FU1熔断器作短路保护,FR1、FR2分别作为电动机M1和1M2的热保护。
2、控制电路分析
控制电路采用380V交流电源供电。按启动按钮SB2,KM线圈得电吸合并自锁,M1电动机直接启动;M1运行后合上Q1,冷却泵电动机启动。按停止按钮SB1,
M1和1M2电动机同时停转。
3、助照明电路
机床照明采用380/36V安全变压器T,由转换开关Q2控制。FU2、FU3分别为
控制电路和照明线路的熔断器。
4、机床电路连接点上标注的数字和文字符号,是用作电气配线和维修使用。
二、电路故障分析
1、主轴电动机不能启动
1)电源部分:线路接线或电源开关接触不良。
2)电源正常,但按SB2时接触器不吸合,可能原因:
A、 控制电路熔断器熔断
B、SB1或SB2接触不良
C、FR1、FR2动作后未复位
D、接触器KM线圈断线
3)按SB2时接触器虽吸合,但MK振动声很大,电动机有嗡嗡响声。
故障现象为缺相。
原因:
(a)FR1烧坏
(b)KM触点烧损严重使某相接触不上
(c)电动机内部接线松脱或断线。
2、按停止按钮SB1机床不停车
原因:
(a)接触器衔铁被油垢粘连
(b) 接触器触点烧损粘连
(c)电磁机构失灵
3、机床运转中突然停车
M1或1M2电动机过热,使热继电器FR1或FR2动作。
China.k【工控老马】—黑龙江省自动化培训中心首席讲师、China.k中国控联盟发起人之一,他很神秘,不要和他比技术,谢谢。他就是传授过众多学员的老师,他就是这么简单。专注:自动化教学软硬件研发及自动化复杂工程解决。
新浪微博:搜索关注工控老马
最好微博打赏下 这是认可
百度云下载资源贴
http://weibo.com/p/2304181359616830102x9lj?from=page_100505_profile&wvr=6&mod=wenzhangmod
")
关注:本微信号回复工控老马获取地址
老马共勉
技术人要学会低调,我一直这样勉励自己,技术的追求是永无止境,技术的更新是日新月异,谁也不能把新技术都了然于胸,谁也不能把新技术产品如数家珍。我们懂得的新技术别人未必知道,别人懂得的新技术我们也云里雾里,毕竟我们研究的方向,走的路是不一样的,技术人最忌讳的就是拿自己的长处和别人短处做比较,这种褒扬自己贬低别人的做法确实能够带来一时的快感和惬意。
每个人生活在这片土地上就有他存在的价值,每个人工作在这片天地中就有他存 在的理由。我们要调整好自己的心态,不要一味的认为别人的无知,不要冷眼观看别人对技术的提问,你或许认为这个技术问题特别可笑,你或许认为那个问题让你不屑一顾,你大可高姿态的对这个问题视而不见,可不能给这个提问题的人冷嘲热讽,也不要频繁打击人家对技术孜孜不倦的信念,或许你的话会扼杀了一个技术天才。
要做事先做人,人不能搞好周围的人际关系,不能很好的适应周围的环境,哪怕你技术再高也没有人敢用你,你总认为自己的技术如何如何,你总是谈论那些高深的新技术来满足自己的那点虚荣心。大家都有感触,一个单位的新技术不会经常更新,新设备并不是频繁更换,所以不可能去研究那些和你本身工作之外的一些所谓的新技术,新设备,也没有人给你时间和机会去学习这些新的理念,换句话说你是从事这方面研究专业方向的才有可能每天都注意这些新技术的发展,新设备的更新。
每个人的技术都是从无到有,从菜鸟变老鸟的过程,每个人都是在实践中不断学习和摸索才总结出来的一些经验,每个人都是在提问的过程中慢慢熟悉了这些新技术,这些新设备的使用,我们用不着拿自己研究的技术来和别人争个高低,作为技术人首先要把自己所在单位的工作业务针对性的进行研究,提高单位的工作效率,增加单位的营业额,其次才是你研究新技术、琢磨新设备使用的时间。
我一直赞同我们技术人要努力学习新技术,增加新知识,不断的充电来让自己适应社会的竞争环境,不喜欢那种满罐子不响半罐子晃荡的人,今天学点东西就到处炫耀,殊不知,技术的学习是个系统工程,不是拿一个知识点两个知识点就能够成为炫耀的资本,任何人在学习技术的道路上都应该脚踏实地而不是夸夸其谈。
关注我
微信号:
chinak958888
(←长按复制)
了解更多,请关注微信号 China.k中国控联盟 汇集中国制造2025技术人的联盟
黑龙江省自动化培训中心欢迎你
全国自动化培训领导者
助力工业智能自动化,增加就业筹码。
相关文章
-
微商客户资源(微商货源网精准客源)详细阅读

微商找客源是对微商来说非常重要的一件事,很多做微商的就是苦苦支撑着因为没有客源,微商如何找客源一直是一个不衰的话题,下面我们就来讨论下这个话题。一:定...
2022-09-08 20239
-
什么是AR(什么是ar导航)详细阅读

增强现实的AR互动营销增强现实的AR互动营销一款叫做《口袋妖怪GO》的手游在欧美火了,在还未上线的中国,#PokemanGo#这一话题的微博阅读量已经...
2022-09-08 19293
-
弯弯的月亮像小船(弯弯的月亮像小船,小小的船儿两头尖)详细阅读

点击上方蓝字关注我们你拍一,我拍一,一个小孩坐飞机。你拍二,我拍二,两个小孩丢手绢。你拍三,我拍三,三个小孩来搬砖。你拍四,我拍四,四个小孩写大字。你...
2022-09-08 14551
-
流苏是什么(流苏是什么样子的图片)详细阅读

导语 听说流苏和秋天更配哦!流苏这个元素也不是今时今日才流行起来的,能经久不衰是因为它真的美呆了~踏进9月,秋高气爽,随风摇曳的流苏真心是风情万种!宝...
2022-09-08 703
-
淘口令是什么意思(什么叫做淘口令)详细阅读

现在开淘宝的越来越多了。但是做得好的好的始终还是那么多,好多人因为刚开始很迷茫,不知道怎么做,或者做到一半发现没有效果,无奈之下只好放弃了,我作为一个...
2022-09-08 742
-
发家致富网(发财致富网)详细阅读
前言:面相五行人格与性格职业密切相关,有什么用的性格就有什么样的命运,性格决定命运。有些人需要白手起家获得财富,有些人则有可能会发横财,你会通过什么方...
2022-09-08 725
-
兼职在家工作(在家工作的兼职)详细阅读
力哥说理财,简单又好玩。跟着力哥走,理财不用愁!本文3100字,阅读约6分钟我要介绍的赚钱工作就是兼职写稿赚稿费。主业靠写作发大财是件非常困难的事,只...
2022-09-08 743
-
系统流程图(系统流程图是描述)详细阅读
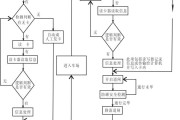
数据流程图(简称DFD)是一种能全面地描述信息系统逻辑模型的主要工具。简言之,就是以图形的方式来描述数据在系统流程中流动和处理的移动变换过程,反映数据...
2022-09-08 699





发表评论